111、
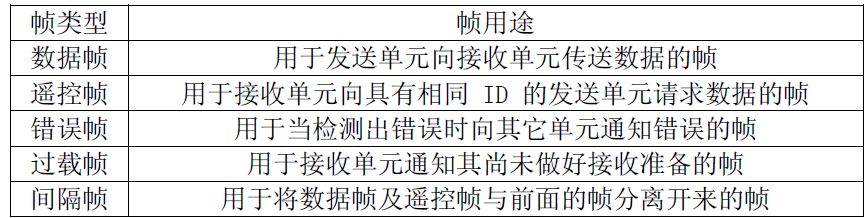
112、CAN协议的有5种类型的帧:数据帧、遥控帧、错误帧、过载帧、帧间隔。其中前两种帧有标准格式(11位ID)和扩展格式(29位ID)。
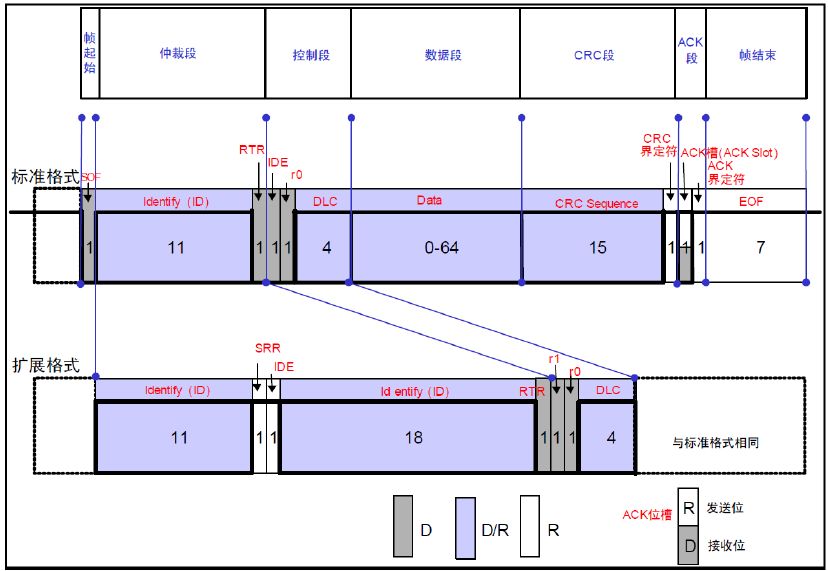
113、数据帧构成:
(1) 帧起始。表示数据开的段帧起始。
(2) 仲裁段。表示该帧优先级的仲裁段。
(3) 控制段。表示数据的字节及保留位段。
(4) 数据段。数据的内容,一帧可发送0~8个字节的数据。
(5) CRC段。 检查帧的传输错误段。
(6) ACK段。 表示确认正常接收的段。
(7) 帧结束。 表示数据的段帧结束。
114、Stm32f103系列只有一个CAN控制器,有3个发送邮箱和3级深度的2个FIFO,14个过滤组器。
115、STM32的每个过滤组可以配置为1个32位过滤器和2个16位过滤器。除此之外,还可以配置为屏蔽位模式(ID+屏蔽)和标识符列表(ID和屏蔽寄存器均用来做ID寄存器)模式。
116、CAN接收到有效报文被放置在3级邮箱深度的FIFO中,FIFO完全由硬件来管理。
117、 CAN总线的波特率

118、触摸屏一般分为电阻式触摸屏和电容式触摸屏。前者检测触摸的位置原理是利用触摸屏控制器中的A/D转换器经过两次A/D读值后得出X和Y的坐标值。注意:这个X和Y的值是相对于触摸屏的,而非LCD屏。所以在这里需要注意两个概念:触摸屏和LCD屏。这是两个不同的概念,也是两个不同的物理结构,其中电阻触摸屏是由上下两个导电层中间夹着一层非常薄的透明隔层;而LCD就是指显示屏。
119、 电阻触摸屏有X和Y、X和Y的比例因子、坐标轴方向、偏移量。LCD也有自己的这些参数。两者完全不相干,所以在定位的时候需要进行坐标转换。公式:
,通过对屏幕的四个点进行校准,得到四元一次方程,求解即可。
120、NEC协议的数据帧格式:同步码头、地址码、地址反码、控制码、控制反码。同步码由一个9ms的低电平和一个4.5ms的高电平组成,地址码、地址反码、控制码、控制反码均是8位数据格式。按照低位在前,高位在后的顺序发送。
121、NEC协议在发送的时候,会有560us的38KHz的载波信号,而在接收的时候这部分载波信号被认定为低电平,而剩余的(2.25ms-650us)的逻辑“1”和(1.12ms-650us)的逻辑“0”时间则被认定为高电平。
122、在单位时间内的位移被定义为速度,速度有线速度和角速度之分,分别对应两种传感器测量这两种不同的速度:线速度传感器(加速度计)、角速度传感器(陀螺仪