BENTLY3500对高速旋转的高炉鼓风机提供在线监测转子的机械性能。轴向位移、径向振动重要参数的正确监测可以为操作人员提供可靠的在线设
备信息,有效的采取各种措施,预防各种非计划停机。作为机组的保护装置,其本身的可靠性、抗干扰性是其发挥保护作用的前提。
本特利3500系统主要由传感器、延伸电缆、前置器、就地电缆和监测保护系统组成。其连接原理图如图一所示:
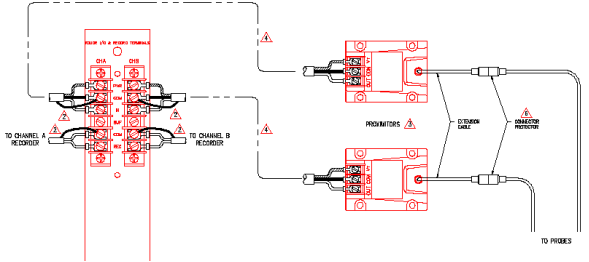
图一:本特利连接原理图
在风机机组中本特利探头主要使用轴位移探头和轴振探头两种。安装方式大致一样。
二、探头安装
2.1轴位移探头安装步骤:
1、探头安装前检查探头的丝口光滑平整,探头表面无油污或其它异物。旋转固定螺帽进退自如,无卡涩现象。
2、用卡尺量准汽轮机转子与固定盘的间距,旋转探头上的固定螺帽,将螺帽与探头前端的距离调整至稍大于量准的间距位置。探头旋进固定盘时用
力不要太
猛,感觉碰到异物,要马上旋出探头检查,以免损坏探头。
3、给本特利3500送电,在现场本特利前置放大器的VT端和COM端接上万用表,检查24V电源是否正常。
4、将探头电缆的连接接头与前置放大器的延伸电缆的连接接头连接好。
5、用万用表接好本特利前置放大器的OUT端和COM端,旋转探头上的固定螺帽,调整探头与转子的间距。标准电压值9.75V±0.2。
6、查微机显示的相应轴振示值是否正常。
2.2轴振探头安装步骤:
1、头安装前检查探头的丝口光滑平整,探头表面无油污或其它异物。旋转固定螺帽进退自如,无卡涩现象。
2、卡尺量准汽轮机转子与上缸开口丝孔的间距,旋转探头上的固定螺帽,将螺帽与探头前端的距离调整至稍大于量准的间距位置。探头旋进时用力不
要太猛,感觉碰到异物,要马上旋出探头检查,以免损坏探头。
3、本特利3500送电,在现场本特利前置放大器的VT端和COM端接上万用表,检查24V电源是否正常。
4、探头电缆的连接接头与前置放大器的延伸电缆的连接接头连接好。
5、万用表接好本特利前置放大器的OUT端和COM端,旋转探头上的固定螺帽,调整探头与转子的间距。标准电压值9.75V。
6、查微机显示的相应轴振示值是否正常,在停机盘车状态下10um以下为正常。
2.3注意事项
1、轴位移探头安装前,要及时与风机工艺检修人员联系,一定要在顶轴后再开始安装。
2、探头电缆与延长电缆连接、延伸电缆与前置器的连接要正确,延伸电缆的连接接头应用专用的接头保护器或热缩管、绝缘胶带包好。严禁将接头
裸露。严禁接头与任何金属接触。
3、轴位移、轴振探头安装前,仔细检查前端有无磨损,擦伤。
三:本特利3500组态
3.1软件组态
1、打开开始菜单,在3500software中选择Rack Configration Software,运行本特利组态软件。(软件版本3.35。组态文件名为*.rak. 默认路径:
3500trainsprimcfg*.rak)
2、点击面板右侧的Slot按钮,进行机架槽位进行组态。
①电源上槽架选择AC High Voltage,在电源下槽架选择NO Power supply.即电源采用非冗余220VAC;
②点击槽1,出现rack setup菜单,在Interface module中选择RIM(Rack interface module),在System Type中选择standard,在Rack size中选择Full
rack(15 slots)
③点击槽2,在出现的菜单中依次选择Monitor------Proximitor/Seisminc monitor------3500/42M.该模板用来作为4个汽机轴振的组态通道。
④点击槽3,在出现的菜单中依次选择Monitor------Proximitor/Seisminc monitor------3500/42M.该模板用来作为4个风机轴振的组态通道。
⑤点击槽4,在出现的菜单中依次选择Monitor------Proximitor/Seisminc monitor------3500/42M.该模板使用Chan1和Chan2来作为2个轴位移的组态
通道。
⑥点击槽5,在出现的菜单中依次选择Relay------Standard Relay.该模板用来组态所有轴振报警,输出方向是报警仪。
⑦点击槽6,在出现的菜单中依次选择Relay------Standard Relay.该模板Chan1、Chan3用来组态轴位移报警,输出方向是报警仪;Chan2、 Chan4用
来组态轴位移跳车,输出方向是计算机。
3、点击面板右侧的Options按钮,对各个模板进行组态。具体参数设定,可以参考附后的组态清单。注意事项有以下几点:
①在RIM组态中,Byte timeout时间设置为20比较合适。点击Security options按钮,在出现的选择项Change setpoints in program mode only前打勾
即只有钥匙开关打到program状态下,才能对组态程序进行修改。
②在对轴振进行组态时,先对通道(channel pair)对进行组态.然后激活每个通道,点击Options按钮进入通道组态。通道对间、通道间如果组态相同
可以进行组态拷贝,点击COPY上下的方向箭头即可;轴振的量程为0~150μm,在Direct 中选择0~150μm PP,在Gap中选择-24VDC。在Recorder
Output 中选择Direct Amplitude,可以保证到计算机的输出信号为4~20mA.
③在对位移进行组态时,先对通道(channel pair)对进行组态.然后激活每个通道,点击Options按钮进入通道组态。对于不使用的通道,不要激活。
轴位移量程为-1.0mm~+1.0mm,在Direct 中选择1.0-0.1.0mm,在Gap中选择-24VDC。其中Normal Thrust Direction选项是指:机组正常运转时,
相对于轴位移探头的运动使靠近还是远离,对于汽机高压端在东侧,因此选择远离即Toward probe.风机高压侧也在东侧,因此选择靠近即Away from
probe.
④对继电器模块进行组态。点击一个Available Monitors 即左上角的模板图形,在Available monitor channel/Alarms空白处,会出现若干该模板已经组
态的通道,例如:S02C01A1表示第二个槽位的第一个通道的报警值。S04C02A2表示第四个槽位的第二个通道的跳车值
4、点击面板右侧的Setpoints按钮,组态设定点。
①汽机轴振动的第一报警点Alarm1为47μm,第二报警点Alarm2为70μm;风机轴振动的第一报警点Alarm1为79μm,第二报警点Alarm2为97μm
②汽机轴位移的第一报警点Alarm1为±0.4mm,第二报警点Alarm2为±0.6mm;风机轴位移的第一报警点Alarm1为±0.56mm,第二报警点Alarm2为±
0.8 mm.
5、点击面板右侧的Point names按钮.给各点输入点名。注意不能输入中文,软件不能识别。
3.2组态下装
①将本特利通讯电缆一头连在计算机的串口上,另一头连在本特利RIM模板的背板的HOST口上,电缆连接好后,给本特利上电。
②连好电缆后,点击File---connect-----Direct,在弹出Direct connect 菜单中选择连接微机的COM口,在Baud中,选择波特率19200或9600,
推荐使用19200。然后点击connect按钮。
③注意事项:
Ⅰ、在连接电缆时,要确认本特利在断电的条件下。而且不要带电插拔。
Ⅱ、如果要修改组态,在修改后先下载File-----Download to rack,然后再上装File-------upload from rack,上装后确认一下改动。
3.3注意事项:
1、连接电缆时,要确认本特利在断电的条件下。而且不要带电插拔 。
2、果要修改组态,在修改后先下载File-----Download to rack,然后在上装File-------upload from rack,上装后确认一下改动。
3、支持中文点名。组态的文件名不能使用中文名。
4、排查本特利故障时,如果机组正在运行,必须把联锁设置屏蔽掉,使用的方法有软件设置和硬件设置两种:
软件设置:在Utility-----Software switch------Slot中,可以对整个模板进行BYPASS,也可以对某个通道进行BYPASS。
硬件设置:在RIM的背板上,将COM和INHABIT两个接线柱进行短接,将会 对整个框架的联锁进行BYPASS。