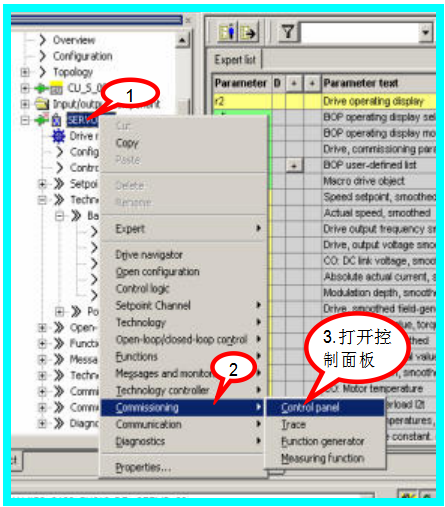

使用控制面板的操作步骤:
使用控制面板激活 “点动”
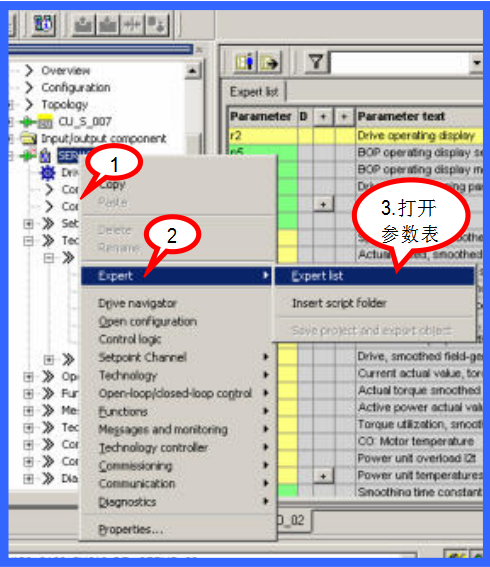
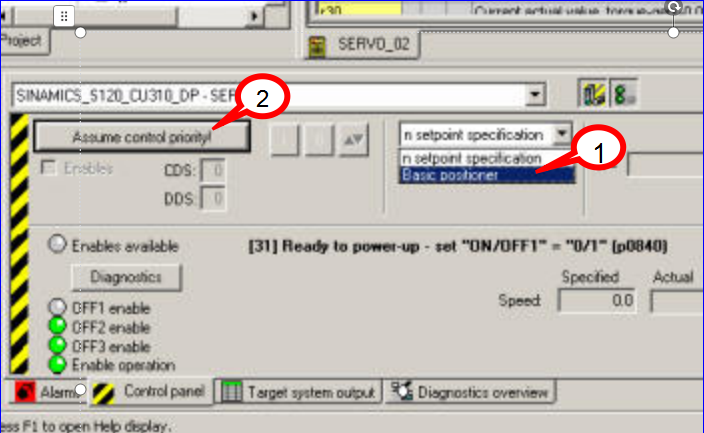
1.选择基本定位功能
2.取得控制权限
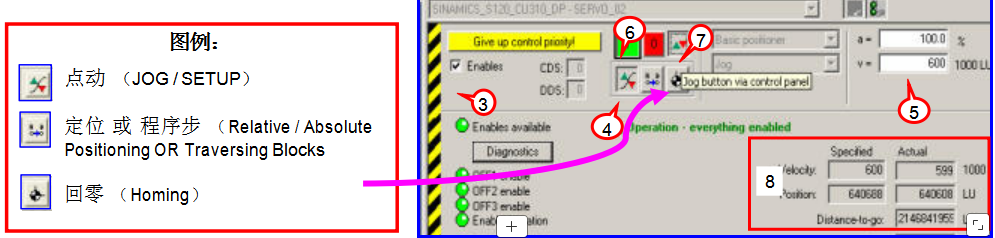
3.斜坡函数发生器、 速度给定等条件使能
4.选择 “点动”
5.设置点动速度、加速度
6.ON/OFF1 使能
7.点动运行
设定值/实际值监视
二、基本定位 点动(JOG):
S120 中点动有两种方式:
·速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
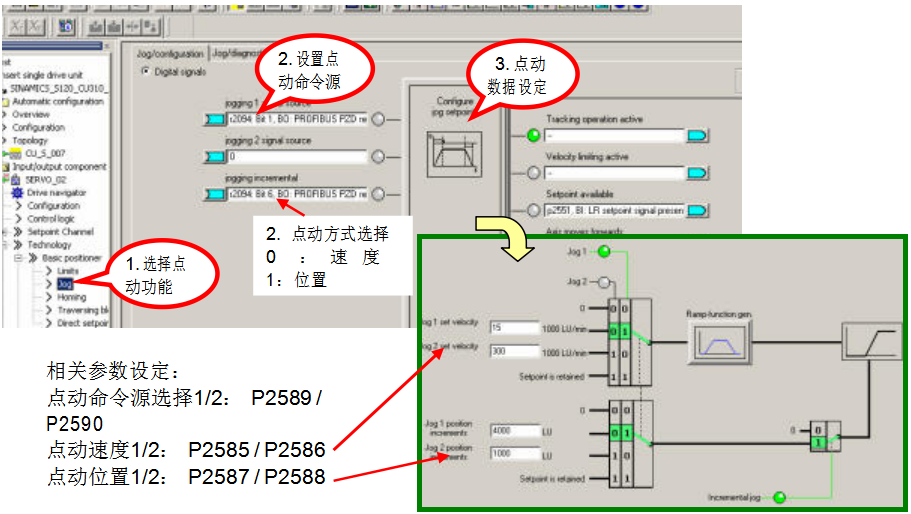
使用控制面板的点动功能仅 限于速度方式,位置方式需使用专家参数表设定。
三、基本定位 回零(Homing / Reference):
回零(Homing / Reference)
回参考点模式(回零模式)只有使用增量编码器(旋转编码器 Reserver、正/余弦编码器 Sin/Cos 或 脉冲编码 器)时需要,因每次上电时增量编码
器与轴的机械位置之间没有任何关系。因此轴都必须被移至预先定义好的 零点位置。即执行 Homing 功能。
当使用绝对编码器 ( Absolute ) 时每次上电不需重新回零 S120 中回零有三种方式:
·直接设定参考点 (Reference): 对任意编码器均可
·主动回零 (Reference point approach): 主要指增量编码器
·被动回零 (Flying Reference):对任意编码器均可
3.1 设置参考点 (Set_Reference)
通过用户程序可设置任意位置为坐标原点。通常情况下只有当系统即无接近开关又无编码器的零脉冲时,或者 当需要轴被设置为一个不同的位置时
才使用该方式
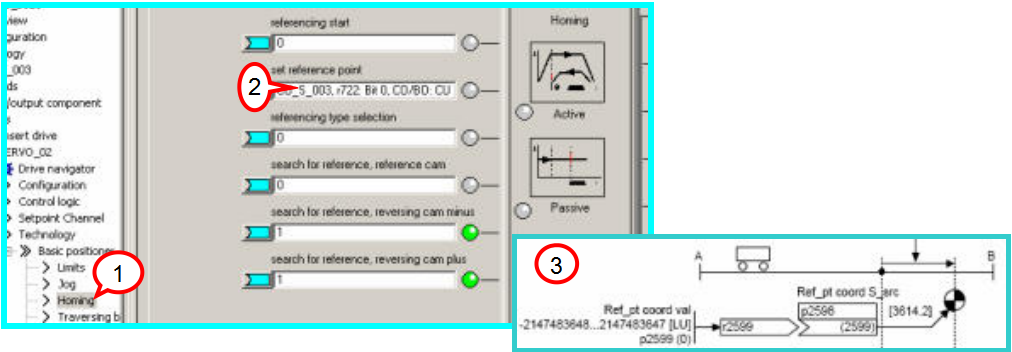
操作步骤(已设定开关量输入点 DI1 为ON/OFF1命令源 P840)
1.已激活定位功能
2.连接一数字量输入点 ( DI 2 )至参数 P2596作为设置参考点信号位,该位上升沿有效
3.设定参考点位置值 P2599(如 0)
4.闭合DI 1运行使能
5.闭合DI 2 激活设置参考点命令,该轴当前位置 r 2521 置为P2599 中设定的值。如 r2521=0
3.2 主动回零(Active Homing)
主动回零方式只适用于增量编码器,绝对值编码器只需在初始化阶段进行一次编码器校准,以后不必做回零
主动回零有三种方式:
仅用编码器零标志位( Encoder Zero Mark ) 回零 仅用外部零标志( External Zero Mark ) 回零