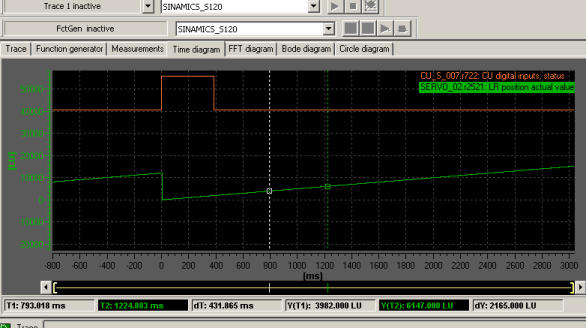
·闭合 DI 2,开始被动回零
·闭合快速开关 DI 10(下图中红色线为该开关状态),可见到位置实际值恢复为 0 而后继续运行 (如图中绿色线所示)
四、基本定位 限位(Limit):
S120 中包含两种限位功能:软限位、硬限位。以限制轴运行范围。同时还有对轴运行速度,加减速的限制。
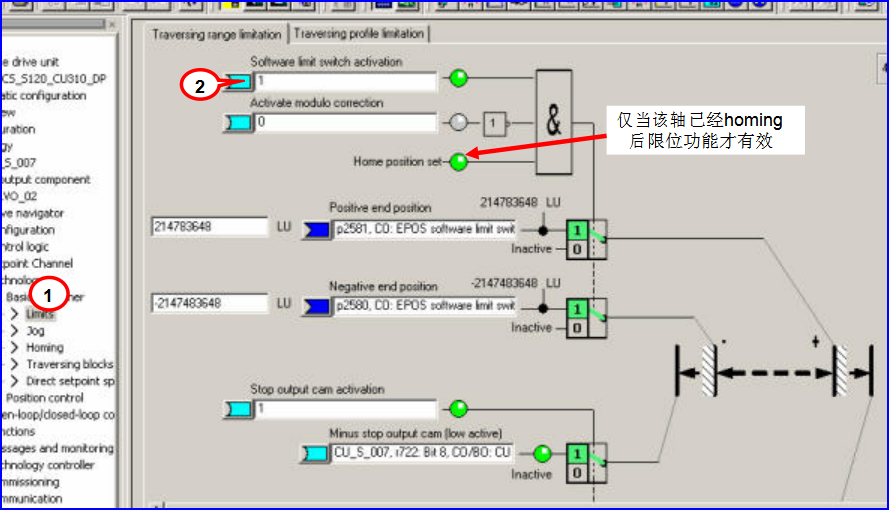
如下图所示激活限位方式
• 项目导航栏中选择限位功能块
• 激活软限位 P2579 =1,正/反向位置范围通过 P2578, P2579 设定
• 激活硬限位 P2568 =1,硬限位位置开关源 P2569, P2570
• 最大速度:P2571、最大加速度:P2572、最大减速度:P2573 注:限位开关信号为 “ 低 “ 有效
五、基本定位 程序步(Traversing Blocks)
通过使用 Traversing Blocks _ “程序步” 模式可以自动执行一个完整的定位程序,也可实现单步控制;各程序步 之间可通过数字量输入信号切换。
但只有当前程序步执行完后下一程序步才有效。
在 S120 中提供了最多 64 个程序步供使用
程序步执行步骤:
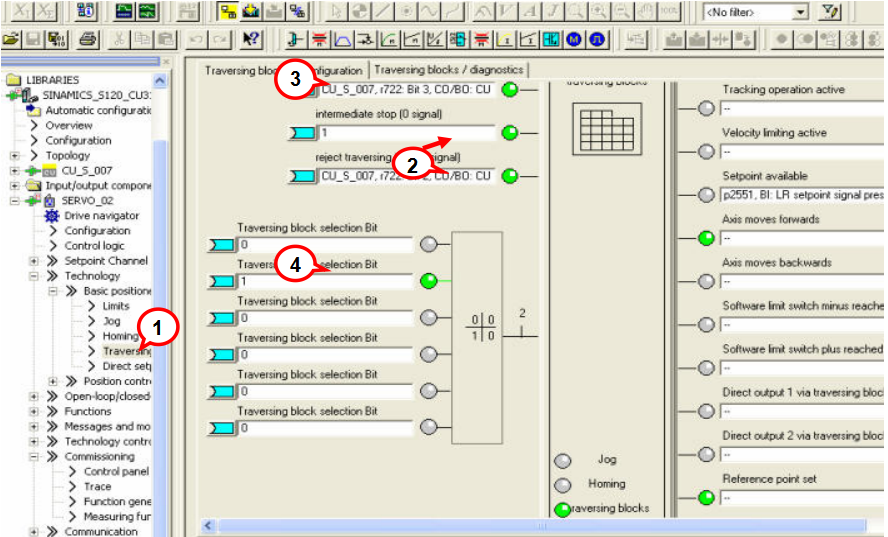
1.项目导航栏中选择 Traversing Blocks 模式,设定开关量输入点 DI3 用于激活程序步功能
2.不拒绝任务 P2641=1、没有停止命令 P2640=1
运行过程中可通过断开联接与 P2640 的外部开关发出停止命令,则轴将以减速度 P2620 减速停车。 若断开联接与 P2641 的外部开关发出拒绝任务命令,
则轴将以最大减速度 P2573 减速停车。
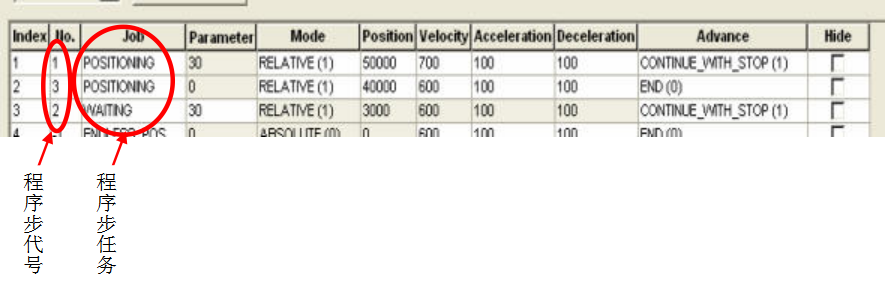
3. 按工艺需要设定各个程序步参数,程序步代号决定程序的执行顺序。代号为 -1 表示该步不执行(初始代
号全部为 -1),
4. 通过 6 个数字量输入点的不同组合选择需要的程序步
闭合 DI1(ON/OFF1)运行,闭合 DI3 激活 Traversing 方式 ( P2631=1 有效 )轴按设定步骤运行。
六、手动数据输入(MDI)
Direct Setpoint Input / MDI (直接设定点输入方式/手动数据输入方式), MDI 的缩写来自于 NC 技术” Manual Data Input ”
使用 MDI 功能我们可以很轻松地通过外部控制系统来实现复杂的定位程序,通过由上位机控制的连续变化的 位置、速度来满足我们的工艺需要。
MDI 有两种不同模式:
·位置 ( position) 模式 P2653=0、