使用接近开关 + 编码器零标志位( Homing output cam + Zero Mark ) 回零
3.2.1 对值编码器的主动回零
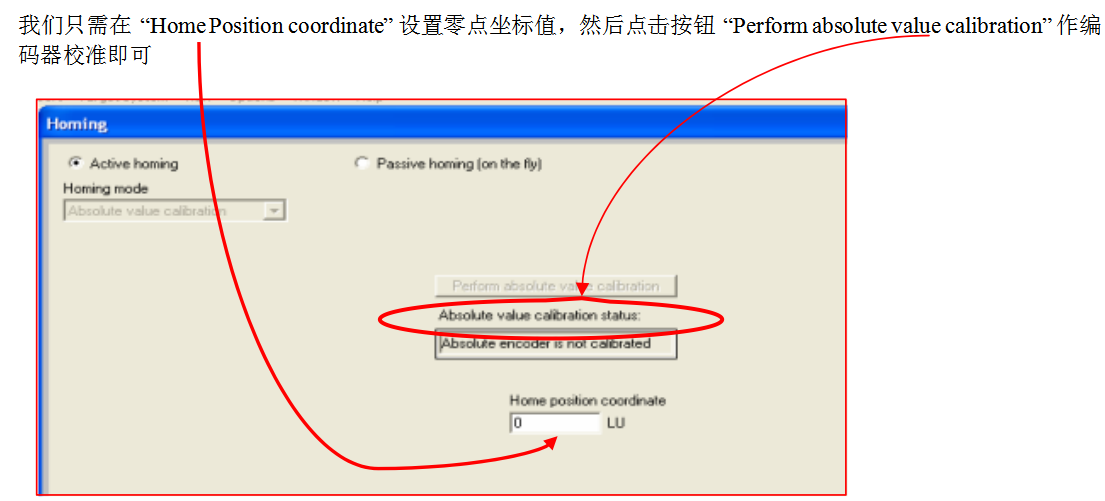
如果我们使用绝对值编码器并且作主动回零时会看到如下页面:
3.2.2、 增量编码器的主动回零
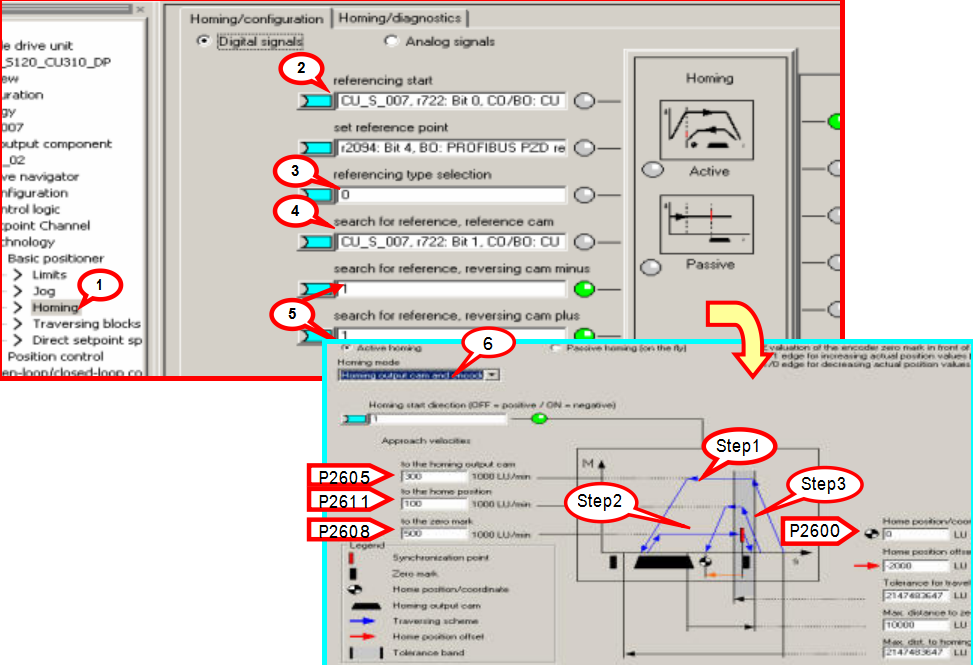
依下图所示进行配置
相关参数设定
1.打开 “ Homing “ (回零) 页面
2.定义开关量输入点 DI 3 为开始寻参命令(参数 P2595=722.2)
回零方式选择主动回零 P2597=0
4.定义开关量输入点 DI 4 为接近开关 P2612= 722.1(粗脉冲)
5.指定轴运行极限点,如果回零过程中极限点到达(P2613/P2614=0)则轴反转。若两点全为零则轴停 止。
6.指定回零方式:接近开关 + 编码器零脉冲
动作过程:
DI1(ON/OFF1)闭合,变频器运行,DI 3 闭合,开始寻参过程
• 上图中(Step1)轴按照 P2604 定义的搜索方向,以最大加速度 P2572 加速至搜索速度 P2605,到达 接近开关后 DI 4 闭合,以最大减速度 P2573
减速停止,进入下一步:搜索编码器的零脉冲
• 上图中(Step2)轴反转加速至速度 P2608,离开接近开关后遇到的编码器的第一个零脉冲后轴停 止。进入下一步:回参考点
• 轴加速以速度 P2611 运行偏置距离 P2600 后停止在参考点(上图中 Step3) 全部动做结束后轴回到零位。完成主动回零过程
3.3 被动回零(Passive Homing)
Passive Homing 又称为 Homing on the fly (被动回零)
被动回零用于轴工作与任意定位状态时动态修改当前位置值为零(如:在点动时、执行程序步时,执行 MDI 时),执行被动回零后并不影响轴当前
的运行状态,轴并不是真正的走到零点而只是其当前位置值被置为 0, 重新开始计算位置
前提条件:P2597=1
绝对值编码器的被动回零:
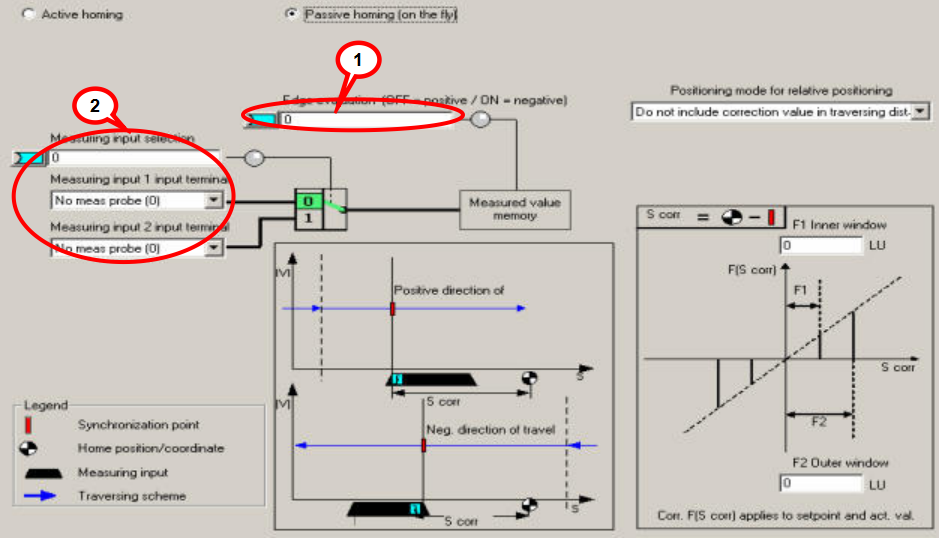
参数设定
• 打开 “ Homing “ (回零) 页面
• 定义开始寻参命令 P2595 源(如开关量输入点 DI2)
• 回零方式选择被动回零 P2597=1
• 指定接近开关 Bero 为上升沿有效(如上图中步骤 1)
• 定义开关量输入点 DI 10(只能为快速 I / O)为接近开关 P2612= 722.10(如上图中步骤 2)
动作过程:
·闭合 DI1(ON/OFF1),变频器运行,选择任意一种命令(如点动,程序步、MDI 等)轴按照所选 择的方式运行